Improving Deep Neural Networks (week2) - Optimization Algorithm
Mini-batch、指数加权平均-偏差修正、Momentum、RMSprop、Adam、学习率衰减、局部最优
这节课每一节的知识点都很重要,所以本次笔记几乎涵盖了全部小视频课程的记录
1. Mini-batch
随机梯度下降法的一大缺点是, 你会失去所有向量化带给你的加速,因为一次性只处理了一个样本,这样效率过于低下, 所以实践中最好 选择不大不小 的 Mini-batch 尺寸. 实际上学习率达到最快,你会发现2个好处,你得到了大量向量化,另一方面 你不需要等待整个训练集被处理完,你就可以开始进行后续工作.
它不会总朝着最小值靠近,但它比随机梯度下降要更持续地靠近最小值的方向. 它也不一定在很小的范围内收敛,如出现这个问题,你可以减小 学习率.
样本集比较小,就没必要使用 mini-batch.
经验值 : 如果 m <= 2000, 可以使用 batch, 不然样本数目 m 较大,一般 mini-batch 大小设置为 64 or 128 or… or 512…
算法初步
对整个训练集进行梯度下降法的时候,我们必须处理整个训练数据集,然后才能进行一步梯度下降,即每一步梯度下降法需要对整个训练集进行一次处理,如果训练数据集很大的时候,如有 500万 或 5000万 的训练数据,处理速度就会比较慢。
但是如果每次处理训练数据的一部分即进行梯度下降法,则我们的算法速度会执行的更快。而处理的这些一小部分训练子集即称为 Mini-batch。
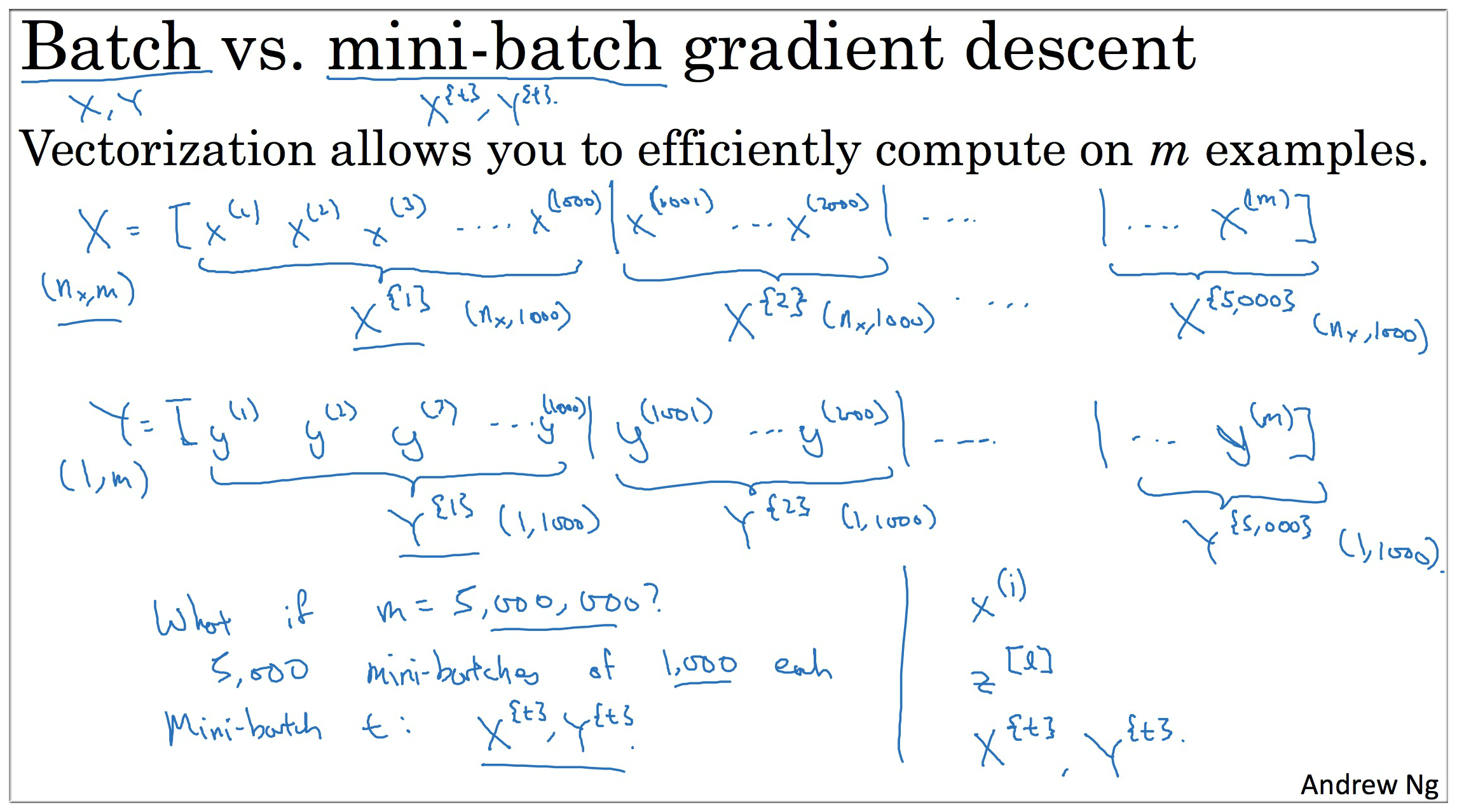
如图,以 1000 为单位,将数据划分,令 , 一般用 , 表示划分后的 mini-batch.
注意区分该系列教学视频的符号标记:
- 小括号() 表示具体的某一个元素,指一个具体的值,例如
- 中括号[] 表示神经网络中的某一层, 例如
- 大括号{} 表示将数据细分后的一个集合, 例如
算法核心
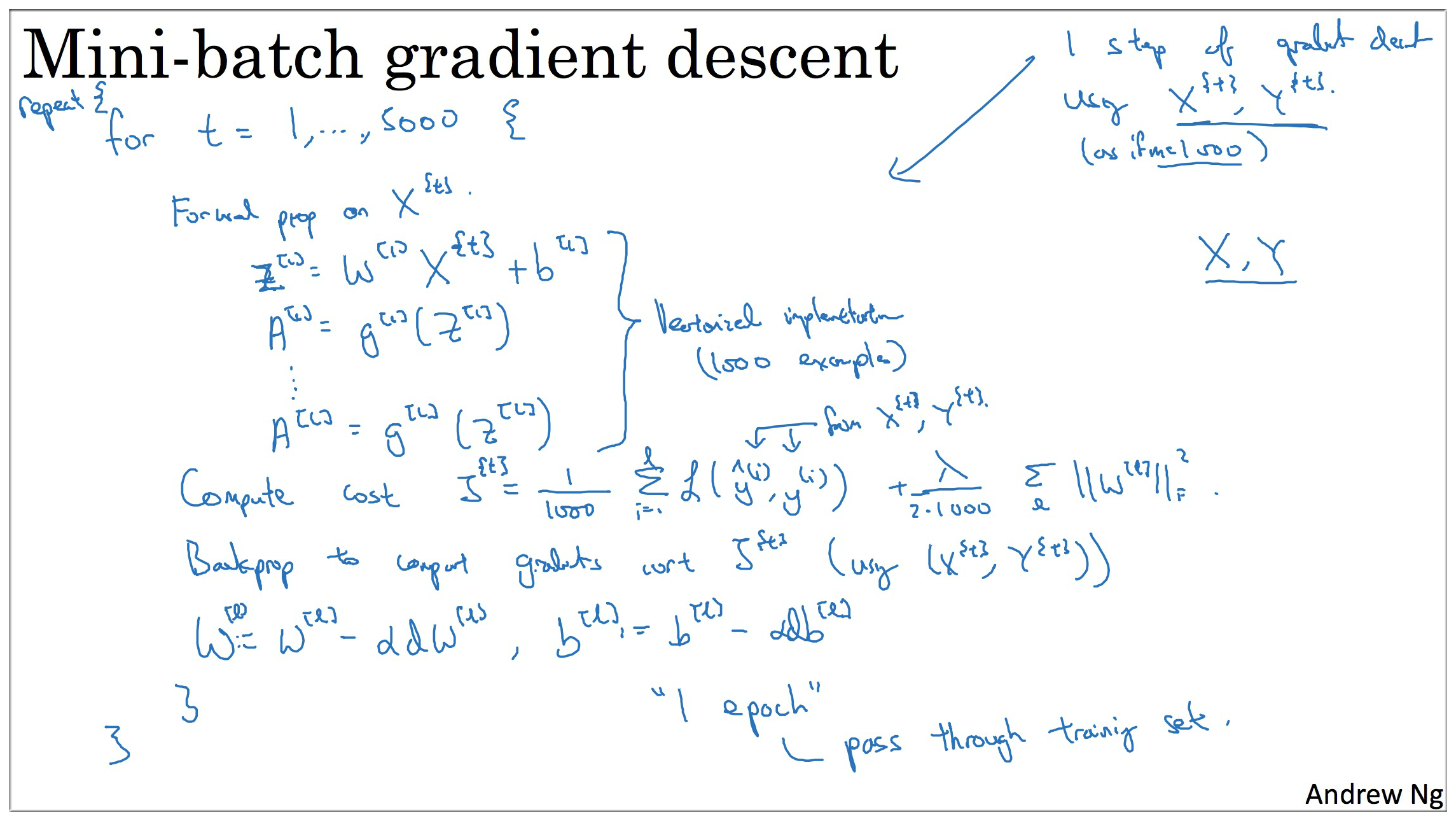
假设我们有 5,000,000 个数据,每 1000 作为一个集合,计入上面所提到的
- 需要迭代运行 5000次 神经网络运算.
- 每一次迭代其实与之前笔记中所提到的计算过程一样,首先是前向传播,但是每次计算的数量是 1000.
- 计算损失函数,如果有 Regularization ,则记得加上 Regularization Item
- Backward propagation
注意,mini-batch 相比于之前一次性计算所有数据不仅速度快,而且反向传播需要计算 5000次,所以效果也更好.
epoch
- 对于普通的梯度下降法,一个 epoch 只能进行一次梯度下降;
- 对于 Mini-batch 梯度下降法,一个 epoch 可以进行 Mini-batch 的个数次梯度下降;
epoch : 当一个
完整的数据集通过了神经网络一次并且返回了一次,这个过程称为一个 epoch。比如对于一个有 2000 个训练样本的数据集。将 2000 个样本分成大小为 500 的 batch,那么完成一个 epoch 需要 4 个 iteration。
不同 size 大小的比较
普通的 batch 梯度下降法 和 Mini-batch梯度下降法 代价函数的变化趋势,如下图所示:
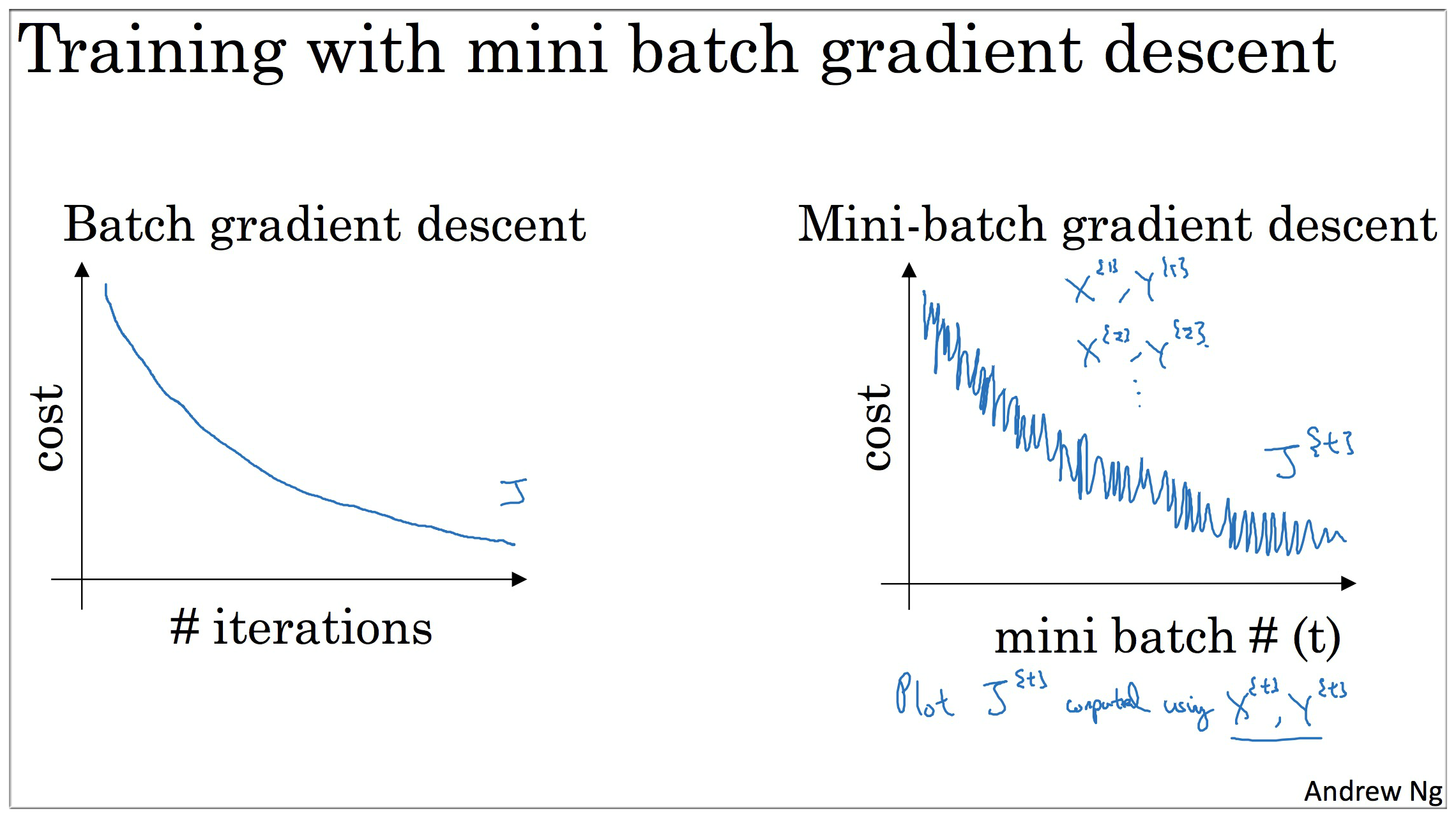
Batch梯度下降 (如下图中蓝色):
- 对所有 m 个训练样本执行一次梯度下降,每一次迭代时间较长;
- Cost function 总是向减小的方向下降。
说明: mini-batch size = m,此时即为 Batch gradient descent
随机梯度下降 (如下图中紫色):
-对每一个训练样本执行一次梯度下降,但是丢失了向量化带来的计算加速;
- Cost function 总体的趋势向最小值的方向下降,但是无法到达全局最小值点,呈现波动的形式.
说明: mini-batch size = 1,此时即为 Stochastic gradient descent
Mini-batch梯度下降 (如下图中绿色):
- 选一个 的合适的 size 进行 Mini-batch 梯度下降,可实现快速学习,也应用了向量化带来的好处
- Cost function 的下降处于前两者之间
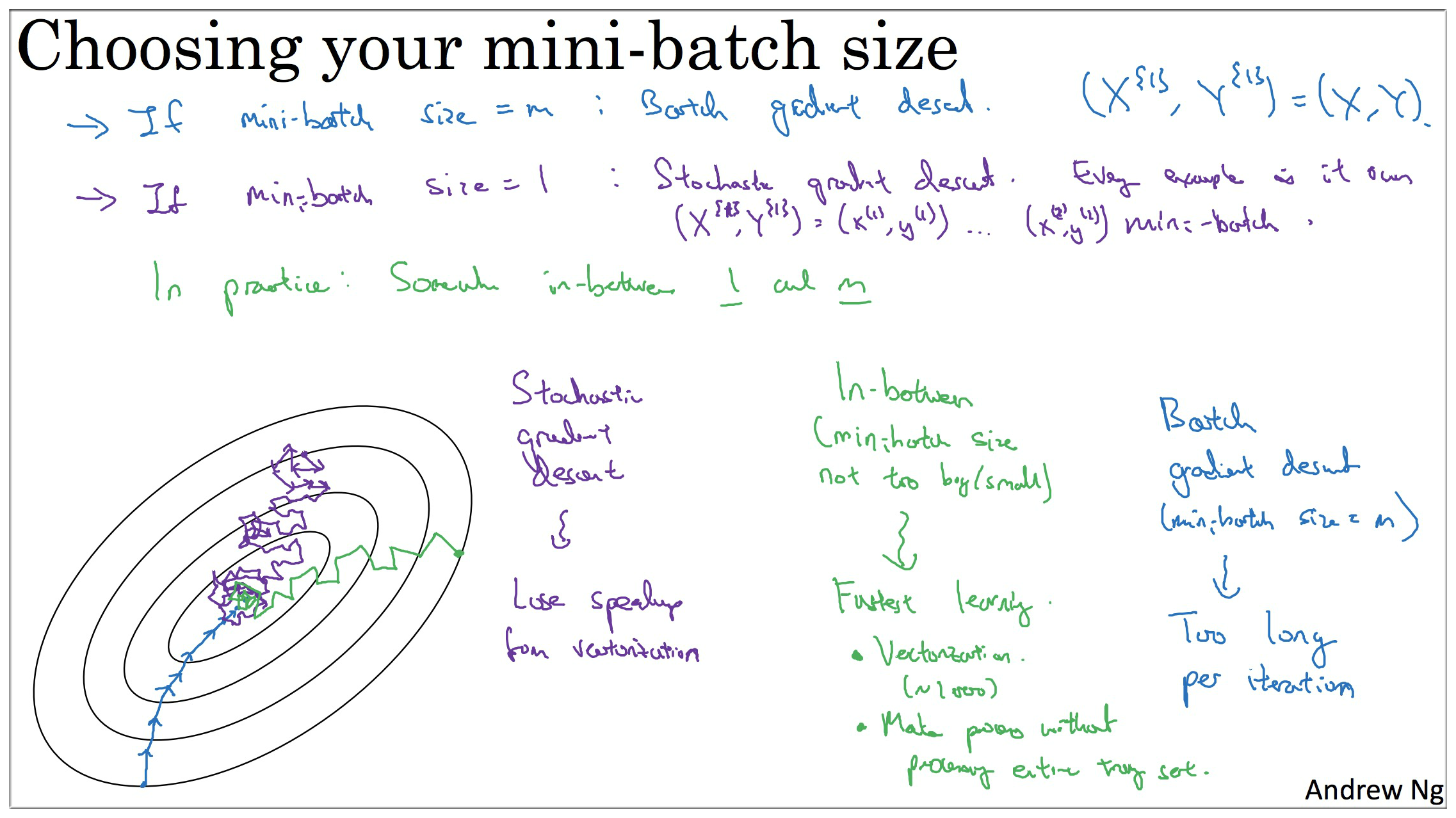
Mini-batch 大小的选择
- 如果训练样本的大小比较小时,如 时 — 选择 batch 梯度下降法;
- 如果训练样本的大小比较大时,典型的大小为:
- Mini-batch 的大小要符合 CPU/GPU 内存, 运算起来会更快一些.
2. Exponentially weighted averages
为了理解后面会提到的各种优化算法,我们需要用到指数加权平均,在统计学中也叫做指数加权移动平均.
指数加权平均的关键函数:
首先我们假设有一年的温度数据,如下图所示
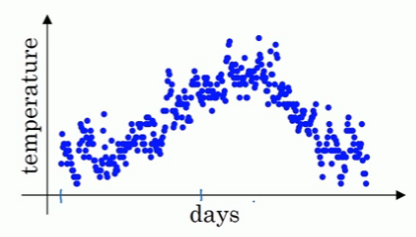
我们现在需要计算出一个温度趋势曲线,计算方法(指数加权平均实现)如下:
上面的 表示第 天的温度,β 是可调节的参数, 表示 天的每日温度